
ISCVの設定は、事前にこの係数を入れておけばOKというものではなく、アイドリング状態でのA/Fや点火時期がセッティングできていないと進めることが出来ません。
それができている前提でセットアップしてください。
初期設定(エンジン始動前)
【Auxiliary Output Functions / Auxiliary Out* – Idle Control / Parameters】
・Frequency
駆動周波数
* 250~400くらい
・Polarity
duty 0% 時の極性
* 0:Output Hi for 0% duty
1:Output Lo for 0% duty
・Output Mode
motecがコントロールする極性
* 0:Low Side (swich to Ground)
1:Hi Side (swich to Battery+)
【Idle Control】 /
【Setup】
・Proportional Gain
比例制御の設定値。
(Duty Cycle Control : % per 10RPM error)
*0.02
・Integral Gain
積分制御設定値。
ざっくりいうと、目標(基準)位置を維持する為の制御。
(Duty Cycle Control : 1%/sec per 10RPM error)
*0.055
・Derivative Gain
微分制御設定値。
比例制御のゲインをもって目標値に近づいた時、オーバーシュートしない様にするためのブレーキ制御。
(Duty Cycle Control : 1% per 10RPM sec error)
*0.02
・dead-band
目標回転数を基準とした不感帯。
この範囲内は目標値から外れていないと認識します。
*10
・Active TP
PID制御「ON」となるスロットル開度。
*0.5
・Active Ground Speed
PID制御「ON」となる車速。
*10
・Active RPM
PID制御「ON」となる回転数。
設定値以下でアクティブとなります。
*1400
・RPM Filter
回転数のフィルター。脈動等考慮して設定します。
*5
・Air Con lncrease
エアコン負荷「ON」で増加させるDuty(%)。
*0
・Power Steering lincrease
パワステ負荷「ON」で増加させるDuty(%)。
*0
【Aim RPM】
目標回転数。
水温とユーザーチャンネル1の2Dマップで設定できます。
*860r.p.m. at 80℃
【Min Output】
アクチュエーター最小Duty。
*25
【Max Output】
アクチュエーター最大Duty。
*100
【Min Integration Limit】
積分制御制限(最小・マイナス側)値。
Normal Position を基準とし、マイナス側の積分制御制限をどの程度にするかDutyで指定。
Normal Position と AimRPM のマッチングが取れていれば、それほど大きい数値にならないと思います。
*-10
【Max Integration Limit】
積分制御制限(最大・プラス側)値。
Normal Position を基準とし、プラス側の積分制御制限をどの程度にするかDutyで指定。
Normal Position と AimRPM のマッチングが取れていれば、それほど大きい数値にならないと思います。
*10
【Initial Position】
PID非制御時のアクチュエーターDuty。
横軸任意の水温で設定できます。
*34
【Normal Position】
PID制御時の基準位置。(アクチュエーターDuty)
水温とユーザーチャンネル1の2Dマップで設定できます。
目標回転数におけるアクチュエーターポジション値を設定。
*32
NA8C・ISCV設定手順
1.上記初期設定値(*)を入力の上、アイドリング状態で水温を80℃程にする。(水温等の増量補正が無い状態にする)
2.Proportional Gain=「0」、Integral Gain=「0」、Derivative Gain=「0」
こうする事でアクチュエーターポジションのPID制御がロックされますから、回転数にも変化があるかと。
Normal Position=Idle Actuator Pos である事と、Normal Positionの数値を上げると回転数が同期して上がる事を確認しておいてください。
3.Idle Normal Position値を調整し、Idle Aim RPM =「860r.p.m」で安定する値を探ります。
GEN号は、Idle Normal Position=「32.5」にすれば、「860r.p.m.」±10でアイドリングしていました。
水温でこの値は変わる可能性があるので、その辺りを見越した値(どちらかというと大きい方向だと思われます)に設定。
4.Idle Initial Position値は、設定したIdle Normal Position より大い値を入れておきます。
5.Idle Min Output値は、冷間補正時にAimRPMになる事を制限しない値にする必要があります。
6.アクセルON→OFFを繰り返し、Idle Actuator Pos の動きをチェック。
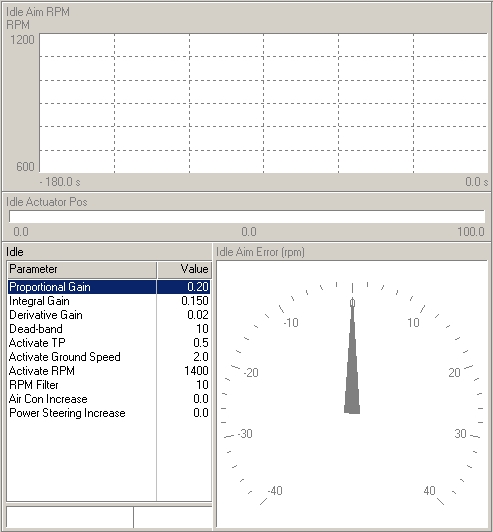
ワタシの場合、以下のようなやり方でセッティングしました。
「0」を頂点に±40くらいの目盛りをふったIdle Aim Error(目標回転数からのズレで、AimRPM=860r.p.m.で、860r.p.m.なら「0」を指します) のダイヤルゲージを表示。
アクセルをあおり、針が振れてから「0」点に収まる様子をよく見て適正値を探ります。
P・I値共、小さい値から大きくする方がわかりやすいです。
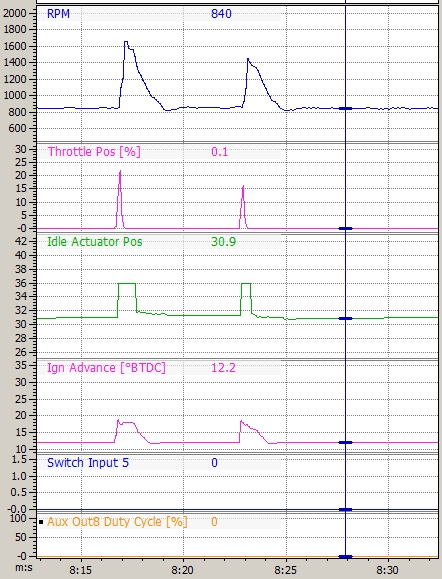
ログをチェックして、 こんな感じになっていたらOK。
<参考>
以下はISCVをTest Outputで駆動した様子です。
・駆動条件
周波数 : 250Hz
Duty : 20~80
DutyはISC内のプランジャーが動き出すところを探り、「23」からスタート。
徐々にDutyを上げていくと、「66」あたりで大きな共振音が発生し、プランジャーの動きが途端に悪くなります。
そのまま数値を大きくすると次第に共振音が収まり、「80」でビシッと動きが止まります。
Duty下げ方向も共振音発生は「66」で、60から23までは作動音も安定してプランジャーもスムーズに動きます。
次はNBのISCV。
・駆動条件
周波数 : 270Hz
Duty : 20~80
アップ版