ISCVの制御がうまくいったことで、日常の走行ではほぼ不満なく動かせる様になりました。
しかし、未だオルタ負荷増によるアイドルの回転落ちは、燃調と点火時期で対応しきれていない感じ。
ヘッドライトとラジエターファンがONになった時、場合によってはタコメーターが「0」までパタッと下がります(笑)
純正ではいずれもISCVが開いてコントロールしているようですから、motecでもそのあたりを何とか工夫できないかとちょっと考えてみました。
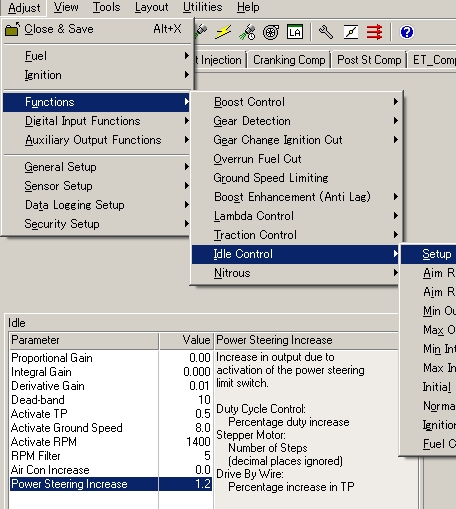
そもそも負荷変動に対し、ISCVを使ってアイドルアップさせることはmotecでも可能で、エアコンONとパワステポンプ作動時に、アクチュエーターを「指定Duty分」開く事が出来ます。
Air Con Increase と Power Steering Increase ですね。
そこで、別チャンネルにアイドルアップさせたい電気負荷の動作信号を接続し、パワステとして設定できればオルタ負荷に対応できるのでは?と、思ったわけです。
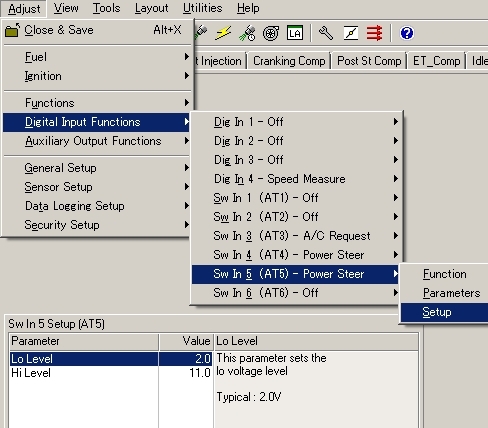
負荷検出は電圧の Hi → Low、 Low → Hi どちらのレベルもON側に設定できますから、動作で電圧変化があればスイッチとして使う事が出来るんではないかと。
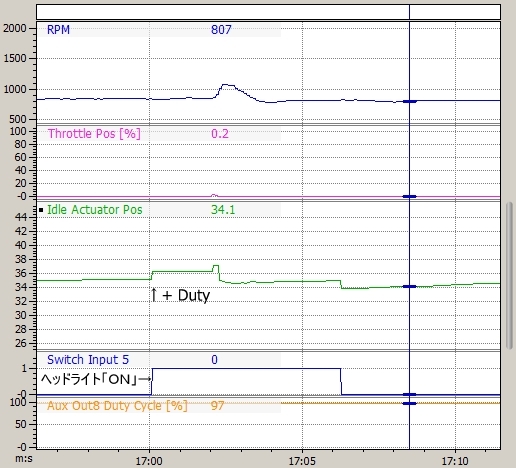
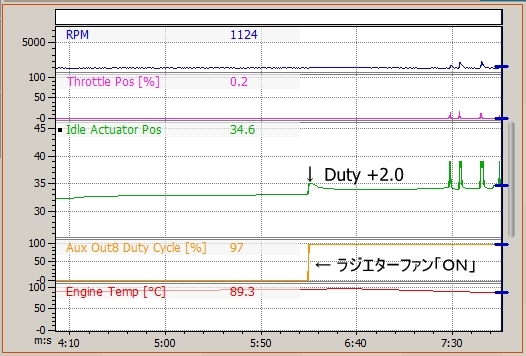
ヘッドライトの方は都合よくスモールランプONで12VをECUに入力する回路がありましたので、これを別チャンネルに結線し下記設定にすると、ヘッドライトをつけるとISCVのDuty値が大きくなりました。
ではラジエターファンは設定できるのか?というところですが、単純に電圧変化を拾える回路は無く、ここは少し考えないといけません。
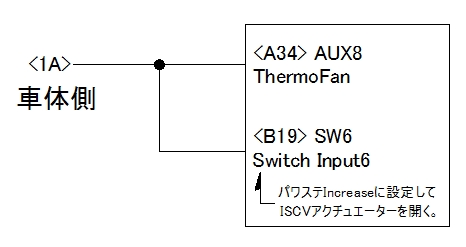
ここはファンリレーのコイル下流で線を分岐し、ラジファンの動作・非動作時の電圧変化をそこでひろう事が出来れば、スイッチインプットとして使えるかも?
イメージ ↓
エンジンルームのダイアグコネクターに、ラジファンリレーのコイル下流から分岐された線が来ていますので、そこで電圧確認してみます。
ファンOFF・・・約14V
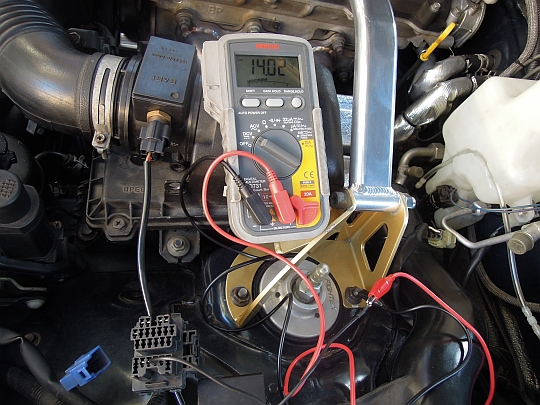
ファンON・・・33mV≒0V

その端子からmotecまで長い線を引っ張り、スイッチインプット6に結線。
ラジファンのON-OFFで電圧変化し、設定値に対してちゃんとスイッチングしているかを確認すると、OK、いけそうですね。
あと、気になっていたパワステ設定を複数チャンネルに割り当てた場合どうなるかですが...
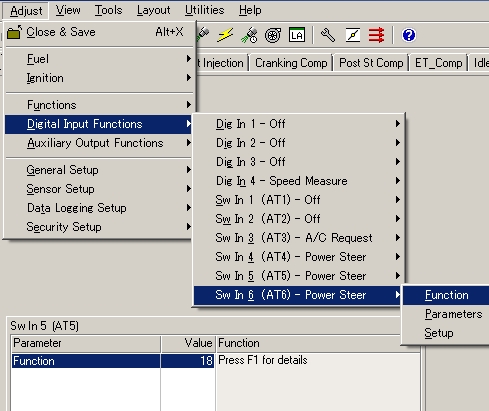
各チャンネルを有効・無効にしてON-OFFし、 Status を見ると、すべてのチャンネルで Switch Input がON ・ OFFと反転するものの、
Switch Input ON → Power Steer Overload ON と関連付いて反転するのは1チャンネルのみ。
残念ながら重複設定はできませんね。
という訳で、1番負荷が重たいであろうラジエターファン動作で、ISCVのアクチュエーターを開かせるようにしたいと思います。