
元々は小さいブルートゥースキーボードをハンドルセンターに取り付けして、使えなくなるホーンボタンを移設する良いアイテムが無いかなぁと探していました。
ハンドルとボスの間に挟みこむホーンボタン移設キットは、あまり選択肢が無くてモノがあってもちょっとお高い。
しかもキーボードの固定方法もなかなか思いつかない(笑)
その懸案を一気に解決するアイテムをどこかで見たような...
あ、コレだと思い出したのがマツプロダクトさんのスマホホルダー。
3Dプリンターのデータも販売されていて、面白そうだなと頭の片隅に残っていたんですね。

写真はマツプロダクトさんより。
MOMOとNARDY両ピッチに対応していますし、在庫があったので購入してみました。
ラフィックスなのでガチャっとハンドルを外して家に持ち込み、届いたホルダーを仮組みしてみます。
ホルダー本体を固定するベースパーツ(取り付け方としてはハンドルとボスの間に挟み込みます)を、ハンドルの上からあてがって確認。
ハンドルピッチは完璧です。

で、ピッチが一致した状態で上から見るとエラーが!
本体を固定するボス部分がハンドルに一部隠れてしまいます。
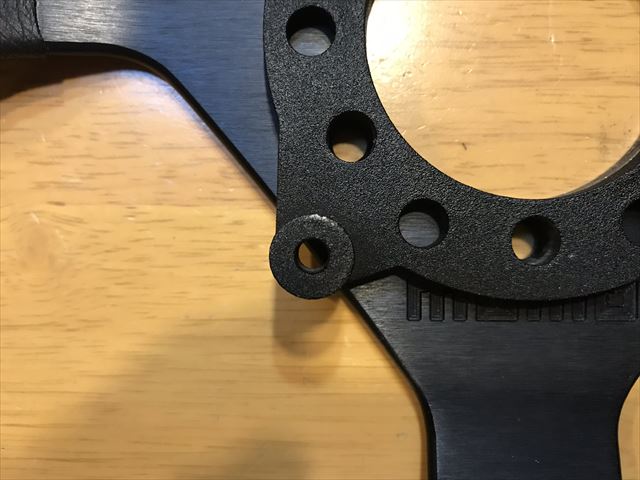

ボス部は裏からハンドル側に出っ張って来ないといけませんから、取り付けできない事がここで判明。
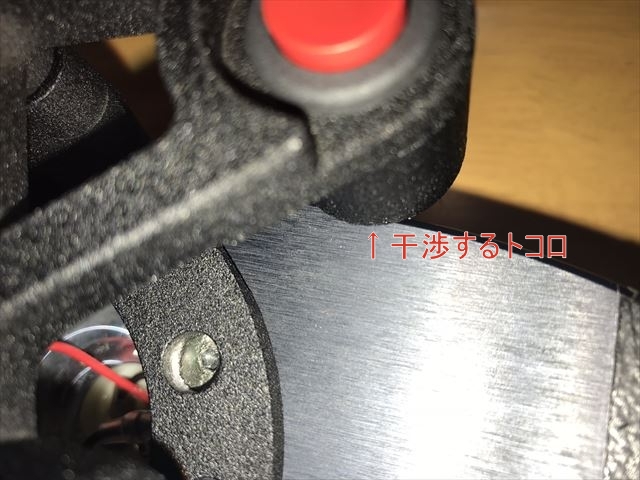
ボスを出す位置までずらすとこんな感じ(^_^;)

仮に何とかボスの顔を出したとしても、本体のホーンボタンが干渉しますので加工は現実的では無いですね。
諦めて返品か?などと思いつつ、とりあえずは現状をマツプロダクトさんに連絡したところ、丁重なお詫びとともに、
「時間をいただけるなら、MOMOベローチェモデルを作ります!」
との返事が!
これぞ神対応ってやつでは無いでしょうか。
干渉部の写真や寸法を何度かやり取りし、待つことひと月あまり。ベローチェ対応モデルが届きました。
左がスタンダード品です。

見栄えでホーンボタンを付けていますが、実際は配線の関係で外すことになります。



その2へつづく...。











