
さて、前回の続きです。
Idle Min Output値を、Idle Normal Position と同じ値にすれば、「Aim rpm から少し落ちて戻ってくる」が解決しそうという話。
以下は現在の設定値です。
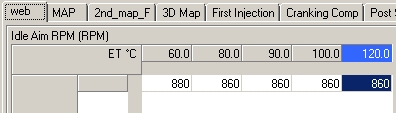
目標回転数 860r.p.m.。
これはワタシが任意で決めた数値。
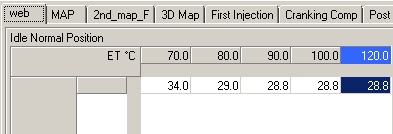
ISCVのノーマルポジション。
ここを基準にPID制御し、目標回転数に近づけます。
目標回転数に合わすため、実際にアイドリング状態で探った数値。
860r.p.mプラスマイナス10r.p.m.でアイドリングします。
ISCVアクチュエーターの最小値。
バイパスバルブがこれ以上閉まらない位置、と解釈して良いと思います。
上記ノーマルポジションと同じ値を入力すれば、回転落ちが解消すると思って入れた数値。
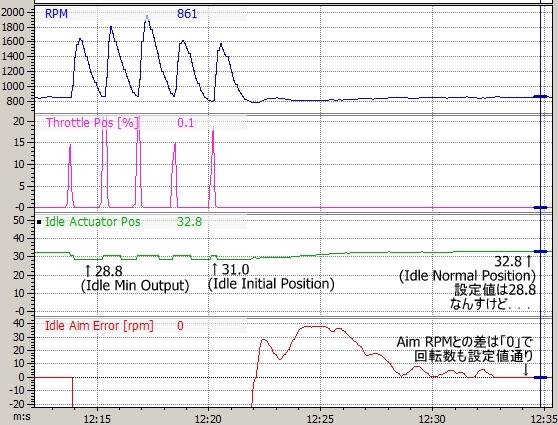
で、本日取ったログ。
ブンブンとアクセルを軽く踏んで、Idle Actuator Pos の動きをみると、確かに設定値通り「28.8」になっていますが、以前よりマシになったものの、回転数が一旦下がる事象は変わりません。
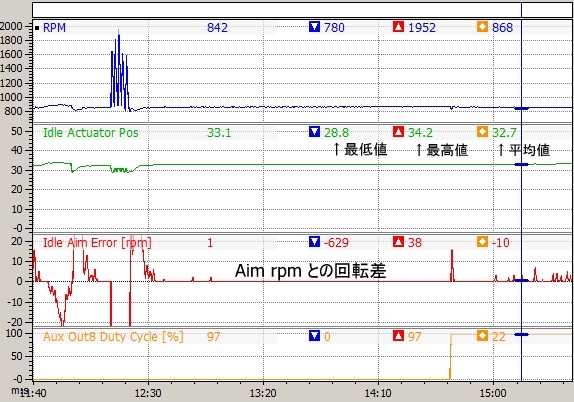
PID制御から外れた時のアクチュエーターは、各パラメーター値にちゃんとなってますが、制御が入るとノーマルポジション値からは外れています。
仮にIdle Normal Position値を実際のポジション値に合わせに行くと、回転数が上昇し目標回転数に対しての差(Idle Aim Error)値が増えてくるので、適切な調整ではなさそう。
目標回転数に必要な空気量を確保するのに必要な分アクチュエーターが開くと、現状「33.0」というポジションになるという事なら、スロットルのバイパスバルブを調整する事で、互いの数値を近づけ、アクチュエーターポジション=ノーマルポジションに出来るかも知れません。
理屈としていまひとつ理解できていませんので、勘ですが(笑)
アクセル開度「0」、アイドリング時のログ。
Idle Actuator Pos の平均値は「33.2」なので、Idle Normal Position の設定値「28.8」より約4.5差があります。
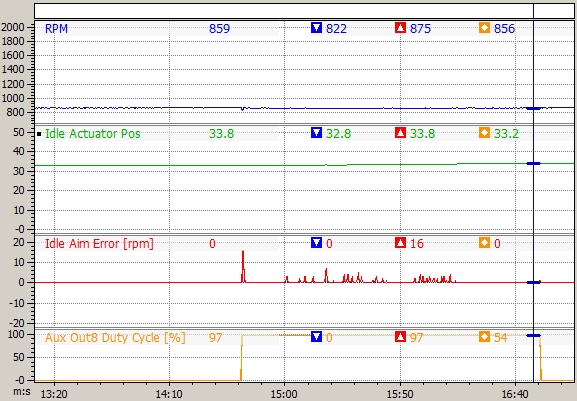
Idle Normal Position と Idle Actuator Pos の差は、負圧が常にあるスロットル内での現象と解釈出来なくもない。
Idle Normal Position値は変更せず、Idle Initial Position と Idle Min Output の数値をPID制御時のアクチュエーターポジション値に合わせるのもアリだとは思います。
でも、パラメーター値=実測値になっていたら、パラメーターをセットしやすい気もするし。
いずれにせよ、アイドリングのセッティングはもう少しつめる余地あり、というハナシでした。