
引き続きISCVのチューニングネタですが、やっと納得いく感じになりました。
結局、ISCVの各パラメーターの意味を勘違いして、適切な設定が出来ていなかったというオチなので、今までのハナシは忘れて下さい(汗)
その代わりと言ってはナンですが、ISCVの設定についてちゃんと書きたいと思います。
ISCVのパラメーターを今更ながら整理すると、
Idle Aim RPM :回転数目標値(860r.p.m.)
Idle Normal Position:PID制御時の基準位置(アクチュエーター開度)
Idle Initial Position:PID非制御時のアクチュエーター開度
Idle Min Output:アクチュエーター最小開度
Idle Max Output:アクチュエーター最大開度
となりますが、ワタシの勘違いは、Idle Aim RPM と Idle Normal Position が何らか紐づけされていると思ってしまったところ。
前回上手くいかないと思い込んでいた、「PID制御が入るとノーマルポジション値 +α のアクチュエーターポジション値になる。」事象は、単に設定した Idle Normal Position から PID制御で アイドリングの回転数を目標回転数にすべく、Idle Actuator Pos が開いていただけの話でした(笑)
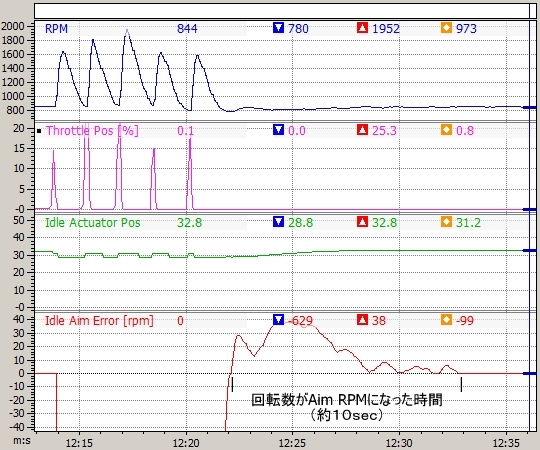
ISCVの各設定値を求める時、着目すべきは Aim RPM における Idle Actuator Pos で、
Idle Min Output や Idle Normal Position の設定をもって
Aim RPM に合わせに行く事ではないという事。
Aim RPM での Idle Actuator Pos はクルマによって変わってくるところで、NAとNBでも違いがあると思います。
という訳で、NA8C・ISCV設定の決定版です。
ちゃけくん、ステキなヒントありがとう。
【追記】
上記記事の設定では、走行条件を網羅するような動きにはなりませんでした。
具体的にはアイドリング時の Idle Actuator Pos が安定しませんので、そこも踏まえて各設定値を調整する必要があります。
詳細については 【Idle Control】 ISCVの設定と調整 に追記予定です。