HELPを読んで何となく理解していたつもりになっていたところ、エラー対応に迫られてなかなか解決できなかったので(笑)自分なりの解釈をここに書いておきます。
Tooth Ratio の設定が必要になるのは、多歯で欠歯があるクランクトリガ(36-1とか60-2など)を装着した場合で、今回はNA8クラセンのSync歯を1枚カットしたものと36-1の組み合わせ。
症状としてはSync Errorが発生してエンジンがかからず、初爆もなし。
Ref/Sync関係のパラメーターについては正しく入力されており、よくわからずデフォルト値のままなのはTooth Ratioのみ。
Tooth ratioは50%に設定すると幸せになるよ!とHELPに書かれていますが、その数値だと今回のケースでは適切ではないようです。
あれこれやって、初爆きました(^^)
結果してSync Errorの原因は、クランキング中の回転の低さとエンジン回転のムラも相まって、隣り合わせの次の歯をTooth Ratio以降に検出してしまい、欠歯と誤検出したためでした。(Ref歯の波形間隔がクランクの回転ムラにより等間隔で入力されない)
そうなるとあらかじめ設定したRef欠歯数(One Missing)と整合性がとれないため、Sync Errorが消えなかったんですね。
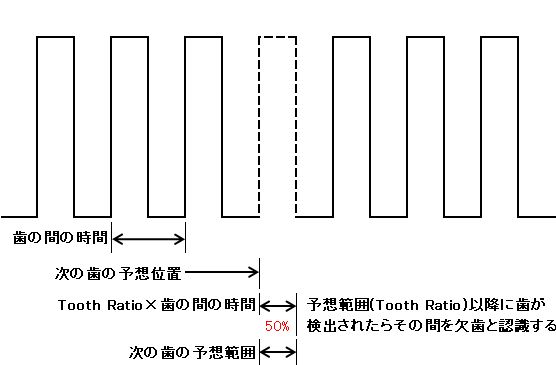
Tooth Ratio については、
「次歯の予想点からTooth Ratio分プラスした範囲が次(隣)歯の検出範囲」
「次歯検出範囲を超えたところで波形を検出したら、その間を欠歯と認識する」
と私は解釈しました。
Tooth Ratio=次歯検出範囲
(エンジン回転ムラを考慮して調整するパラメーター)
という事ですね。
回転ムラで歯の間隔が広がり、Tooth Ratioというエリアを外れたら「ギャップ」とみなしてしまうので次歯検出範囲を広げてやると上手く行きます。
(数値ををトリガーエラーが出なくなるまで大きくする)